مقدمة إلى مستشعر الحركة PIR (HC-SR501)
مستشعر حركة PIR ، المعروف أيضًا باسم a ص حازم أنا nfrared س إنسور ، هو نوع من الأجهزة الإلكترونية التي تستخدم عادة لاكتشاف وجود الإنسان أو الحيوان في نطاق معين. HC-SR501 هو نموذج شائع لمستشعر الحركة PIR المعروف بموثوقيته وسهولة استخدامه.

يعمل عن طريق استخدام كاشف الأشعة تحت الحمراء السلبية لاستشعار التغيرات في درجة الحرارة ، والتي يمكن أن تحدث بسبب حركة شخص أو حيوان. إذا تم اكتشاف حركة الكائن ، يتم إرسال إشارة إلى أجهزة مثل نظام الأمان أو لوحة التحكم في الإضاءة. غالبًا ما تستخدم مستشعرات الحركة PIR في أنظمة الأمن المنزلي وأنظمة الإضاءة الآلية والتطبيقات الأخرى حيث يكون من المهم اكتشاف وجود شخص أو حيوان.
عمل مستشعر الحركة PIR (HC-SR501)
ال HC-SR501 يعمل مستشعر الحركة PIR باستخدام كاشف الأشعة تحت الحمراء السلبية لاستشعار التغيرات في درجة الحرارة. إنه مصمم لاكتشاف وجود إنسان أو حيوان ضمن نطاق معين ، يصل عادةً إلى حوالي 8 أمتار (26 قدمًا).
عندما يكون المستشعر خاملاً ، فإنه يراقب درجة الحرارة باستمرار في مجال رؤيته. إذا اكتشف المستشعر تغيرًا في درجة الحرارة ، مثلما يحدث بسبب حركة شخص أو حيوان ، فسيرسل إشارة إلى جهاز متصل. باستخدام هذه الإشارة ، يمكننا إنشاء استجابات مثل تشغيل الضوء أو تنشيط المنبه.

يحتوي مستشعر الحركة PIR على مقياسين للجهد على اللوحة يمكن استخدامه لضبط حساسية و تأخير الوقت من المستشعر.
- حساسية يحدد مقدار التغير في درجة الحرارة المطلوب لتشغيل مستشعر PIR. يمكن ضبطه اعتمادًا على الحركة التي نحتاج إلى اكتشافها مثل حركة الماوس أو الورقة.
- تأخير الوقت يحدد المدة التي يظل فيها المستشعر نشطًا بعد اكتشاف تغير في درجة الحرارة.
Pinout HC-SR501
يتضمن دبوس مستشعر PIR:
- VCC : هذا هو دبوس الطاقة الخاص بجهاز استشعار PIR. قم بتوصيله بمصدر طاقة 5 فولت.
- GND : هذا هو دبوس الأرض. قم بتوصيله بـ GND أو الطرف السالب لمصدر الطاقة.
- خارج : هذا هو دبوس الإخراج. يرسل إشارة رقمية إلى جهاز متصل عندما يكتشف المستشعر الحركة.
- ضبط التأخير : هذا هو دبوس تعديل الحساسية. يمكن ضبط حساسية المستشعر هذه.
- ضبط الحساسية : هذا هو دبوس تعديل تأخير الوقت. يمكن استخدامه لضبط طول الفترة الزمنية التي يظل فيها المستشعر نشطًا بعد اكتشاف تغير في درجة الحرارة.
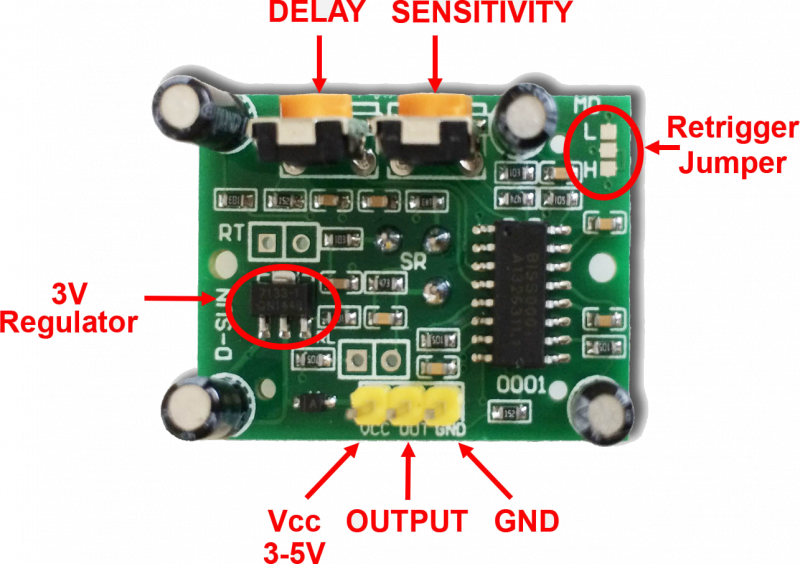
يحتوي PIR HC-SR501 على 3 دبابيس إخراج. دبابيس VCC و GND عبارة عن دبابيس طاقة بينما يكون الدبوس الأوسط أو الثالث لإخراج إشارة الزناد الرقمي.
واجهة مستشعر حركة PIR (HC-SR501) مع Arduino Nano
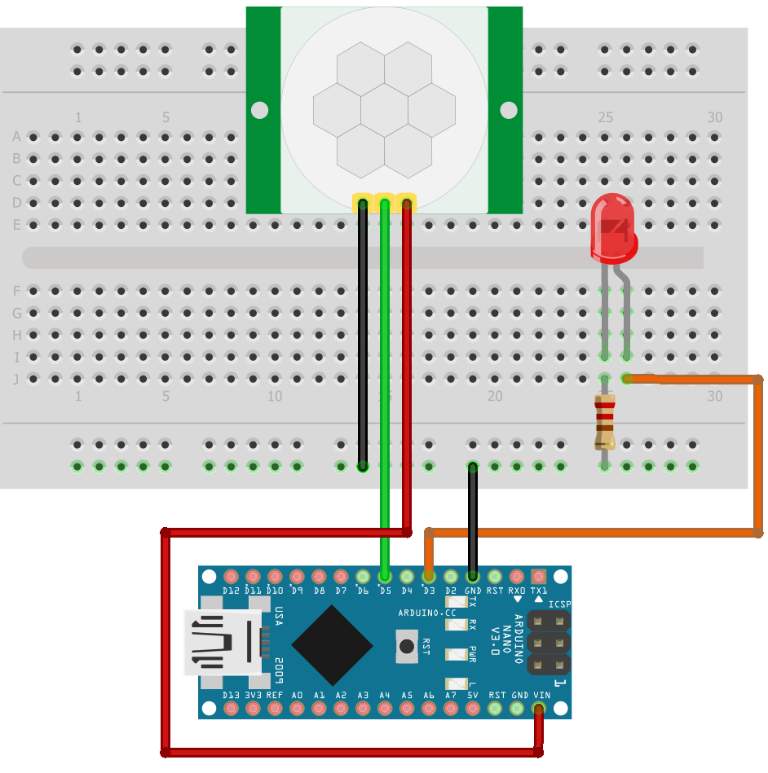
إن الربط بين مستشعر حركة PIR ، مثل HC-SR501 ، مع متحكم Arduino Nano هو عملية مباشرة يمكن إنجازها باستخدام عدد قليل من المكونات. للبدء ، قم بتوصيل دبابيس VCC و GND على مستشعر PIR بدبابيس 5V / VIN و GND على Arduino Nano ، على التوالي. بعد ذلك ، قم بتوصيل دبوس OUT الموجود على مستشعر PIR بأي طرف إدخال رقمي على Arduino Nano.
بمجرد إجراء هذه الاتصالات ، يمكنك استخدام Arduino Nano لقراءة الإخراج الرقمي لمستشعر PIR وتنفيذ الإجراء المطلوب ، مثل تشغيل مؤشر LED أو إرسال إشعار. من المهم ملاحظة أن مستشعر الحركة PIR قد يتطلب قدرًا صغيرًا من المعايرة حتى يعمل بشكل صحيح. يمكن القيام بذلك عادةً عن طريق ضبط إعدادات الحساسية وتأخير الوقت باستخدام مقاييس الجهد الموجودة على متن الطائرة.
المكونات المطلوبة هي:
- اردوينو نانو
- مستشعر حركة PIR (HC-SR501)
- يؤدى
- 220 أوم المقاوم
- توصيل الأسلاك
- اللوح
تخطيطي
معطى صورة تظهر مخطط الأسلاك لمستشعر PIR مع لوحة Arduino Nano:
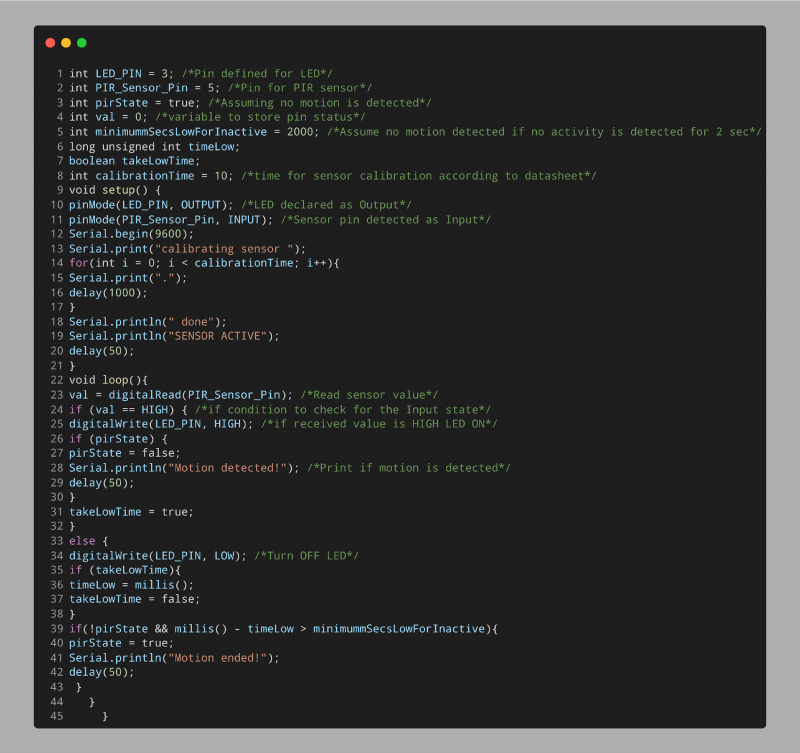
رمز
يفتح يذهب (بيئة تطوير متكاملة). حدد لوحة Nano وانقر فوق الزر تحميل بعد كتابة الكود أدناه.
int PIR_Sensor_Pin = 5 ؛ / * دبوس ل مستشعر PIR * /
int pirState = حقيقي ؛ / * بافتراض عدم اكتشاف أي حركة * /
int val = 0 ؛ / * متغير لتخزين حالة دبوس * /
int minimummSecsLowForInactive = 2000 ؛ / * افترض أنه لم يتم الكشف عن أي حركة لو لم يتم الكشف عن أي نشاط ل 2 ثانية * /
وقت طويل غير موقّع
منطقية takeLowTime ؛
int calibrationTime = 10 ؛ / * الوقت ل معايرة المستشعر وفقًا لورقة البيانات * /
الإعداد باطل ( ) {
pinMode ( LED_PIN ، الإخراج ) ؛ / * أعلن LED مثل انتاج | * /
pinMode ( PIR_Sensor_Pin ، INPUT ) ؛ / * تم الكشف عن دبوس جهاز الاستشعار مثل إدخال * /
المسلسل ( 9600 ) ؛
المسلسل ( 'مستشعر معايرة' ) ؛
ل ( int أنا = 0 ؛ i minimummSecsLowForInactive ) {
pirState = حقيقي ؛
المسلسل. println ( 'انتهت الحركة!' ) ؛
تأخير ( خمسون ) ؛
}
}
}
بدأ الكود بتحديد دبوس الإدخال لمستشعر PIR ودبوس الإخراج لـ LED. متغير int فال ويعرف. سيقوم هذا المتغير بتخزين حالة طرف إخراج PIR.
بعد ذلك ، باستخدام ملف pinMode وظيفة ، يتم تعريف LED ودبوس المستشعر على أنهما الإخراج والمدخل على التوالي. إذا تم استخدام شرط. إذا تلقى Arduino Nano مدخلات عالية من مؤشر LED للمستشعر ، فسيتم تشغيله. وبالمثل ، إذا لم يتم اكتشاف أي حركة ، فسيتم إرسال إشارة منخفضة إلى Arduino مما يؤدي إلى إيقاف تشغيل مؤشر LED.
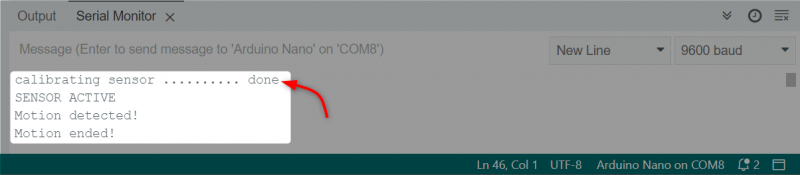
انتاج |
سيتم عرض الإخراج أدناه بمجرد اكتشاف الحركة بواسطة مستشعر PIR. يقوم المستشعر الأول بمعايرة نفسه بعد ذلك يمكنه اكتشاف أي حركة.
المعدات
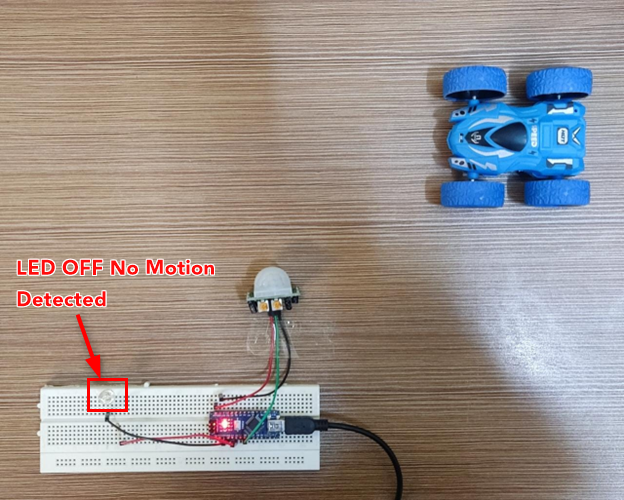
مؤشر LED مطفأ لأنه لم يتم الكشف عن أي حركة.
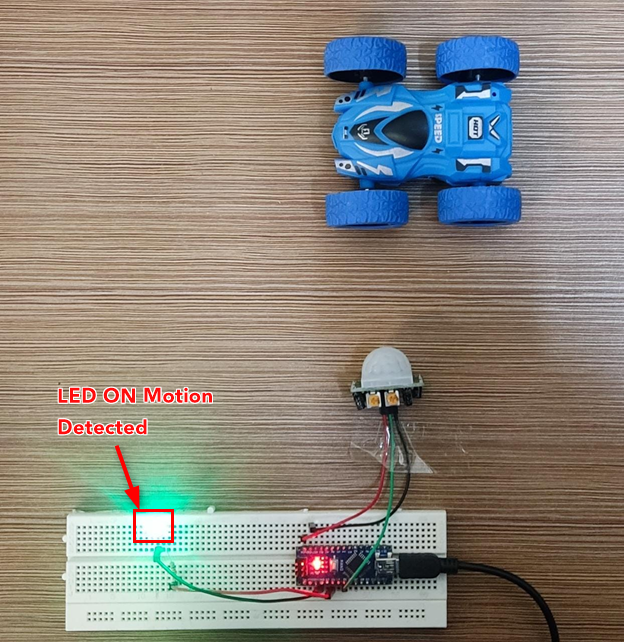
الآن تتحرك السيارة ويتم تشغيل مؤشر LED عند اكتشاف الحركة.
استنتاج
يمكن ربط Arduino Nano بأجهزة استشعار مختلفة مثل PIR. باستخدام هذا المستشعر يمكن اكتشاف أي حركة جسم. يحتوي مستشعر PIR مع Arduino على تطبيقات متعددة مثل أنظمة الأمن المنزلي أو إضاءة الشوارع. تتناول هذه المقالة كود Arduino الكامل والخطوات المتبعة في اكتشاف حركة الكائن.