ESP32 عبارة عن لوحة متحكم تعتمد على إنترنت الأشياء والتي يمكن استخدامها للواجهة والتحكم وقراءة أجهزة الاستشعار المختلفة. PIR أو مستشعر الحركة هو أحد الأجهزة التي يمكننا التفاعل مع ESP32 لاكتشاف حركة كائن في نطاق مستشعر الحركة باستخدام ESP32.
قبل أن نبدأ في ربط ESP32 بمستشعر PIR ، يجب أن نعرف كيفية عمل المقاطعات وكيفية قراءتها والتعامل معها في ESP32. بعد ذلك ، يجب أن نفهم المفهوم الأساسي لوظيفة delay () و millis () في برمجة ESP32.
دعونا نناقش عمل PIR مع ESP32 بالتفصيل.
هذا هو محتوى هذا المقال:
1: ما هي المقاطعات
تعمل معظم الأحداث التي تحدث في برمجة ESP32 بالتتابع مما يعني تنفيذ التعليمات البرمجية سطريًا. للتعامل مع الأحداث التي لا تحتاج إلى تشغيلها أثناء التنفيذ المتسلسل للكود والتحكم فيها المقاطعات يستخدم.
على سبيل المثال ، إذا أردنا تنفيذ مهمة معينة عند حدوث أي حدث خاص ، أو إذا تم إعطاء إشارة تشغيل إلى المسامير الرقمية الخاصة بالمتحكم الدقيق ، فإننا نستخدم المقاطعة.
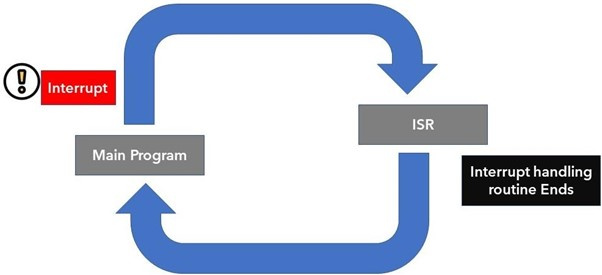
مع المقاطعة ، لا نحتاج إلى التحقق باستمرار من الحالة الرقمية لدبوس إدخال ESP32. عند حدوث مقاطعة ، يوقف المعالج البرنامج الرئيسي ويتم استدعاء وظيفة جديدة تُعرف باسم ISR ( يقطع خدمة روتينية ). هذه ISR تعالج الوظيفة المقاطعة الناتجة بعد ذلك تعود إلى البرنامج الرئيسي وتبدأ في تنفيذه. أحد أمثلة ISR هو مستشعر الحركة PIR أيّ يولد مقاطعة بمجرد اكتشاف الحركة .
1.1: مقاطعات الدبابيس في ESP32
يمكن أن تحدث مقاطعة خارجية أو مقاطعة بسبب أي وحدة أجهزة مثل مستشعر اللمس أو زر الضغط. تحدث مقاطعات اللمس عند اكتشاف لمسة في دبابيس ESP32 أو يمكن أيضًا استخدام مقاطعة GPIO عند الضغط على مفتاح أو زر ضغط.
في هذه المقالة سنقوم بتشغيل مقاطعة عند اكتشاف الحركة باستخدام مستشعر PIR مع ESP32.
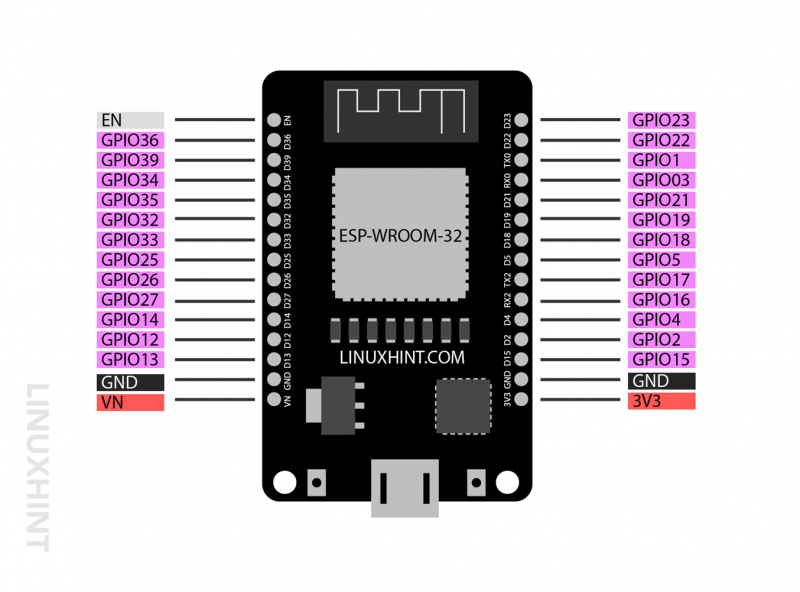
تقريبًا جميع دبابيس GPIO باستثناء 6 دبابيس SPI مدمجة والتي تأتي عادةً في 36 لا يمكن استخدام إصدار -pin من لوحة ESP32 لغرض مقاطعة الاتصال. لذلك ، لتلقي المقاطعة الخارجية ، فيما يلي الدبابيس المميزة باللون الأرجواني التي يمكن للمرء استخدامها في ESP32:
هذه الصورة من 30 دبوس ESP32.
1.2: استدعاء مقاطعة في ESP32
لاستخدام المقاطعة في ESP32 يمكننا الاتصال إرفاق المقاطعة () وظيفة.
تقبل هذه الوظيفة الحجج الثلاث التالية:
-
- دبوس GPIO
- الوظيفة المراد تنفيذها
- الوضع
1: GPIO الدبوس هو الوسيطة الأولى التي تسمى داخل إرفاق المقاطعة () وظيفة. على سبيل المثال ، لاستخدام الرقم الرقمي 12 كمصدر للمقاطعة ، يمكننا تسميته باستخدام digitalPinToInterrupt (12) وظيفة.
2: الوظيفة ليتم تنفيذه هو البرنامج الذي يتم تنفيذه في كل مرة بمجرد الوصول إلى المقاطعة أو تشغيلها بواسطة مصدر خارجي أو داخلي. يمكن أن يكون إما وميض LED أو تشغيل إنذار الحريق.
3: الوضع هي الحجة الثالثة والأخيرة التي تحتاجها وظيفة المقاطعة. يصف متى يتم تشغيل المقاطعة. فيما يلي الأوضاع التي يمكن استخدامها:
-
- قليل: قم بتشغيل المقاطعة في كل مرة يكون فيها دبوس GPIO المحدد منخفضًا.
- عالٍ: قم بتشغيل المقاطعة في كل مرة يكون فيها دبوس GPIO المحدد مرتفعًا.
- يتغيرون: مقاطعة الزناد في كل مرة يغير دبوس GPIO قيمته من الأعلى إلى الأدنى أو العكس.
- هبوط: إنه الوضع الذي يؤدي إلى حدوث مقاطعة عندما يبدأ دبوس معين في السقوط من حالة عالية إلى منخفضة.
- ارتفاع: إنه الوضع الذي يطلق المقاطعة عندما يبدأ دبوس معين في الارتفاع من حالة منخفضة إلى عالية.
اليوم سوف نستخدم ارتفاع كوسيطة ثالثة لوظيفة المقاطعة عندما يكتشف مستشعر PIR أن مؤشر LED للمقاطعة أو المستشعر سوف يضيء لأنه ينتقل من حالة منخفضة إلى عالية.
2: المؤقتات في برمجة ESP32
تلعب الموقتات في برمجة وحدة التحكم الدقيقة دورًا مهمًا في تنفيذ التعليمات لفترة زمنية محددة أو في وقت محدد.
هناك وظيفتان رئيسيتان تستخدمان بشكل شائع لتشغيل الإخراج هما تأخير() و ميلي () . يوقف الاختلاف بينهما ، حيث تعمل وظيفة
سنستخدم هنا مصباح LED مع مستشعر PIR ولا نريد توهجه بشكل مستمر بعد مشغلات المقاطعة. سنستخدم الدالة millis () التي تسمح لنا بالتوهج لبعض الوقت المحدد ثم نعود مرة أخرى إلى البرنامج الأصلي بمجرد مرور هذا الطابع الزمني.
2.1: وظيفة تأخير ()
وظيفة () تصلب متعدد من نوع البيانات الطويلة غير الموقعة. تمثل هذه الوسيطة الوقت بالمللي ثانية الذي نريد إيقاف البرنامج مؤقتًا حتى ينتقل إلى السطر التالي.
على سبيل المثال ، ستوقف الوظيفة التالية البرنامج لـ 1 ثانية .
تأخير ( 1000 )
التأخير () هو نوع من وظيفة الحجب لبرمجة المتحكمات الدقيقة. يعمل إذا أردنا تنفيذ تعليمات متعددة ، فيجب أن نتجنب استخدام وظائف التأخير بدلاً من ذلك يمكننا استخدام وحدات ميلي أو وحدات RTC للوقت الخارجي.
2.2: مللي () الوظيفة
تُرجع الدالة millis () عدد المللي ثانية التي مرت منذ أن بدأت لوحة ESP32 في تشغيل البرنامج الحالي. من خلال كتابة بضعة أسطر من التعليمات البرمجية ، يمكننا بسهولة حساب الوقت الحالي في أي حالة أثناء تشغيل رمز ESP32.
يستخدم الميلي على نطاق واسع حيث نحتاج إلى تشغيل مهام متعددة دون حظر باقي التعليمات البرمجية. فيما يلي بناء جملة دالة المللي المستخدمة لحساب مقدار الوقت المنقضي حتى نتمكن من تنفيذ تعليمات معينة.
إذا ( تيار ميليس - السابق ميليس > = الفاصل الزمني ) {PreviousMillis = CurrentMillis ؛
}
يطرح هذا الكود الملي السابق () من الملي () الحالي إذا كان الوقت المخصوم يساوي لتعريف الفاصل الزمني ، سيتم تنفيذ تعليمات معينة. لنفترض أننا نريد وميض مصباح LED لمدة 10 ثوانٍ. بعد كل 5 دقائق ، يمكننا ضبط الفترة الزمنية التي تساوي 5 دقائق (300000 مللي ثانية). سيتحقق الرمز من الفاصل الزمني في كل مرة يتم فيها تشغيل الكود ، وبمجرد وصوله ، سيومض مؤشر LED لمدة 10 ثوانٍ.
ملحوظة: هنا سنستخدم وظيفة millis () لربط ESP32 بمستشعر PIR. السبب الرئيسي وراء استخدام الميلي وليس التأخير هو أن وظيفة millis () لا تمنع الكود كما فعلت وظيفة delay (). لذلك بمجرد أن يكتشف PIR الحركة ، سيتم إنشاء مقاطعة. سيؤدي استخدام وظيفة المقاطعة ميلي () إلى تشغيل مؤشر LED لوقت محدد بعد ذلك إذا توقفت الحركة ، فستتم إعادة تعيين وظيفة المللي () وانتظر المقاطعة التالية.
في حالة استخدام وظيفة delay () ، فسوف تحظر الكود تمامًا ولن تتم قراءة أي مقاطعة ناتجة عن طريق ESP32 مما يؤدي إلى فشل المشروع.
3: واجهة مستشعر PIR مع ESP32
هنا سنستخدم وظيفة millis () في كود Arduino IDE لأننا نريد تشغيل LED في كل مرة يكتشف فيها مستشعر PIR بعض الحركة. سوف يتوهج هذا LED لفترة محددة بعد ذلك سيعود إلى حالته الطبيعية.
فيما يلي قائمة بالمكونات التي سنطلبها:
-
- مجلس التنمية ESP32
- مستشعر حركة PIR (HC-SR501)
- قاد
- 330 أوم المقاوم
- توصيل الأسلاك
- اللوح
تخطيطي لمستشعر PIR مع ESP32:
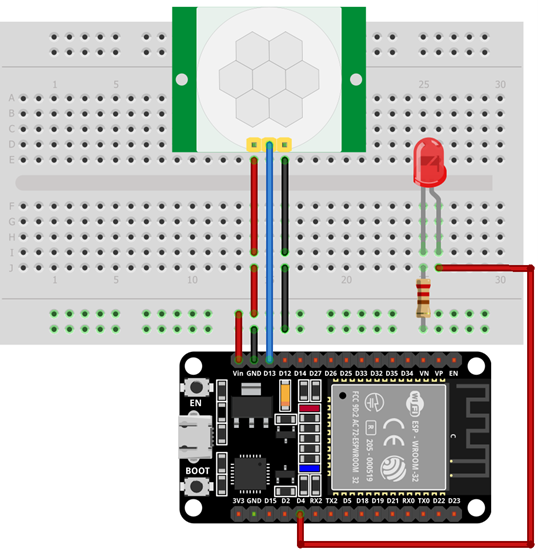
توصيلات دبوس ESP32 مع مستشعر PIR هي:
| ESP32 | مستشعر PIR |
| يأتي | Vcc |
| GPIO13 | خارج |
| GND | GND |
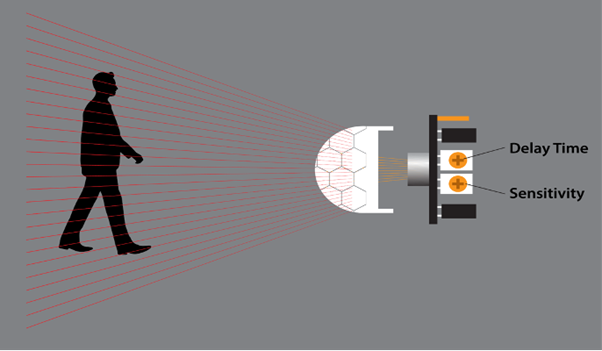
3.1: مستشعر حركة PIR (HC-SR501)
PIR هو اختصار لـ مستشعر الأشعة تحت الحمراء السلبية . يستخدم زوجًا من أجهزة الاستشعار الكهروحرارية التي تكتشف الحرارة حول محيطها. يقع كل من المستشعرات الكهروحرارية واحدًا تلو الآخر وعندما يدخل جسم ما داخل نطاقهما ، يتسبب تغيير في الطاقة الحرارية أو اختلاف الإشارة بين هذين المستشعرين في أن يكون خرج مستشعر PIR منخفضًا. بمجرد أن يصبح دبوس إخراج PIR منخفضًا ، يمكننا تعيين تعليمات محددة للتنفيذ.
فيما يلي خصائص مستشعر PIR:
-
- يمكن ضبط الحساسية اعتمادًا على موقع المشروع (مثل استشعار الماوس أو حركة الأوراق).
- يمكن ضبط مستشعر PIR على المدة التي يكتشف فيها كائنًا.
- تستخدم على نطاق واسع في أجهزة إنذار أمن المنزل وغيرها من تطبيقات الكشف عن الحركة الحرارية.
3.2: Pinout HC-SR501
يأتي PIR HC-SR501 بثلاثة دبابيس. اثنان منهم عبارة عن دبابيس طاقة لـ Vcc و GND وواحد هو دبوس الإخراج لإشارة الزناد.
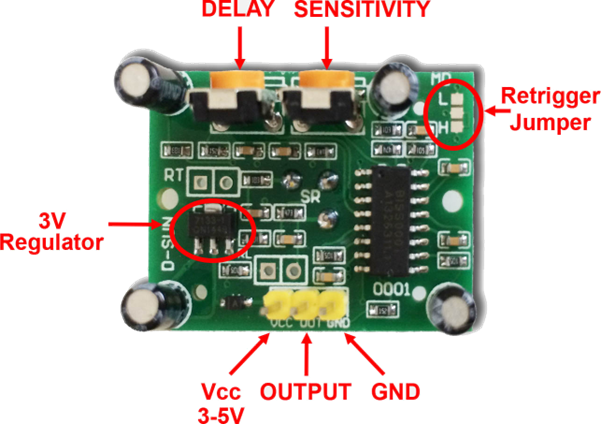
فيما يلي وصف دبابيس مستشعر PIR:
| دبوس | اسم | وصف |
| 1 | Vcc | دبوس الإدخال الخاص بالمستشعر قم بتوصيله بـ ESP32 Vin Pin |
| اثنين | خارج | خرج المستشعر |
| 3 | GND | مستشعر GND |
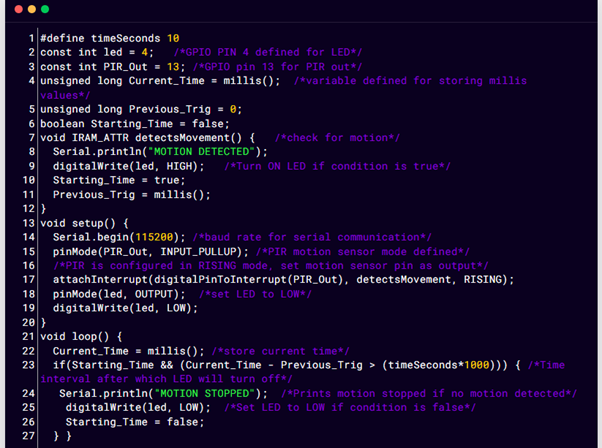
3.3: كود
الآن لبرمجة ESP32 ، اكتب الكود المحدد في محرر Arduino IDE وقم بتحميله على ESP32.
#define timeSeconds 10أدى كثافة العمليات = 4 ؛ / * GPIO PIN 4 مُعرف إلى عن على قاد * /
const int PIR_Out = 13 ؛ / * دبوس GPIO 13 إلى عن على PIR خارج * /
Current_Time طويل بدون توقيع = ملي ( ) ؛ / * متغير محدد إلى عن على تخزين قيم المللي * /
الصفحة السابقة طويلة بدون توقيع = 0 ؛
منطقية وقت البدء = خاطئة ؛
باطل IRAM_ATTR يكتشف الحركة ( ) { / * التحقق من إلى عن على حركة * /
المسلسل. println ( 'تم اكتشاف الحركة' ) ؛
الكتابة الرقمية ( أدى ، عالية ) ؛ / * قم بتشغيل LED إذا الشرط حقيقي * /
بدء_وقت = حقيقي ؛
Previous_Trig = ملي ثانية ( ) ؛
}
الإعداد باطل ( ) {
المسلسل ( 115200 ) ؛ / * معدل الباود إلى عن على الاتصال التسلسلي * /
pinMode ( PIR_Out ، INPUT_PULLUP ) ؛ / * تم تحديد وضع مستشعر الحركة PIR * /
/ * تم تكوين PIR في وضع الصعود ، تعيين دبوس استشعار الحركة كما انتاج * /
ارفق المقاطعة ( digitalPinToInterrupt ( PIR_Out ) يكتشف الحركة صعود ) ؛
pinMode ( أدى ، الإخراج ) ؛ / * تعيين LED إلى LOW * /
الكتابة الرقمية ( أدى ، منخفض ) ؛
}
حلقة فارغة ( ) {
Current_Time = ملي ( ) ؛ / * مخزن الحالي زمن * /
إذا ( بدء_الوقت && ( Current_Time - الدرجة السابقة > ( الوقت * 1000 ) ) ) { / * الفاصل الزمني بعد أيّ سوف ينطفئ LED * /
المسلسل. println ( 'الحركة متوقفة' ) ؛ / * توقفت حركة المطبوعات إذا لم يتم الكشف عن أي حركة * /
الكتابة الرقمية ( أدى ، منخفض ) ؛ / * اضبط LED على LOW إذا الشرط خاطئة * /
بدء_وقت = خاطئة ؛
}
}
بدأ الكود بتحديد دبابيس GPIO لإخراج LED و PIR. بعد ذلك ، أنشأنا ثلاثة متغيرات مختلفة ستساعد في تشغيل LED عند اكتشاف الحركة.
هذه المتغيرات الثلاثة هي الوقت الحالي - الوقت السابق - الدرجة الثالثة ، و بدء_الوقت. ستخزن هذه المتغيرات الوقت الحالي والوقت الذي يتم فيه اكتشاف الحركة والمؤقت بعد اكتشاف الحركة.
في جزء الإعداد أولاً ، حددنا معدل الباود التسلسلي للاتصال. بعد ذلك باستخدام pinMode () اضبط مستشعر حركة PIR على أنه INPUT PULLUP. لضبط مقاطعة PIR إرفاق المقاطعة () لقد تم وصفه. تم وصف GPIO 13 لاكتشاف الحركة في وضع RISING.
بعد ذلك ، في حلقة () جزء من الكود ، باستخدام وظيفة millis () قمنا بتشغيل وإيقاف تشغيل LED عند تحقيق المشغل.
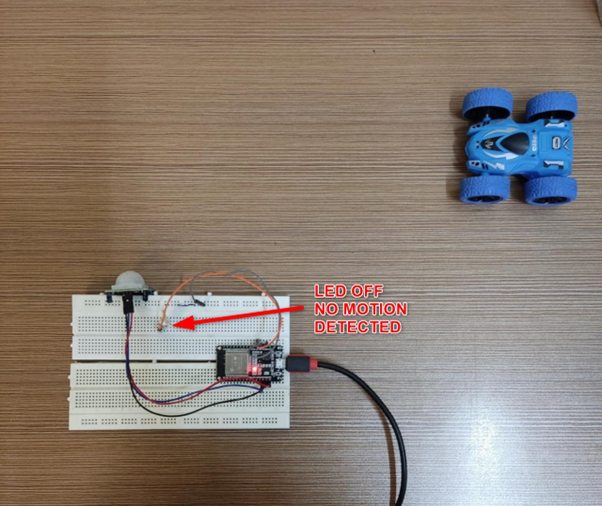
3.4: الإخراج
في قسم الإخراج ، يمكننا أن نرى الكائن خارج نطاق مستشعر PIR ، لذا فإن ملف قاد يتم تشغيل إيقاف .
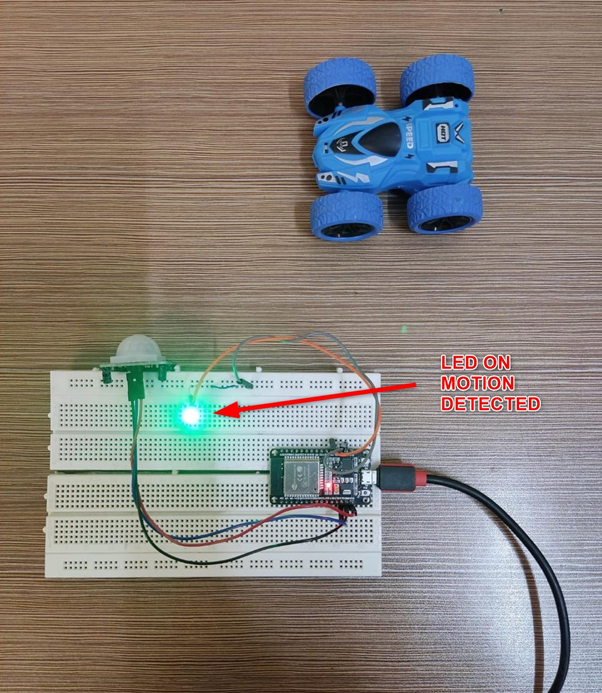
الآن سوف تتحول الحركة التي اكتشفها مؤشر LED لمستشعر PIR على إلى عن على 10 ثانية بعد ذلك إذا لم يتم الكشف عن أي حركة فإنها ستبقى إيقاف حتى يتم استلام الزناد التالي.
يتم عرض الإخراج التالي بواسطة الشاشة التسلسلية في Arduino IDE.
استنتاج
يمكن أن يساعد مستشعر PIR المزود بـ ESP32 في اكتشاف حركة الأجسام التي تمر عبر نطاقها. باستخدام وظيفة المقاطعة في برمجة ESP32 ، يمكننا تشغيل استجابة عند بعض دبوس GPIO المحدد. عند اكتشاف التغيير ، سيتم تشغيل وظيفة المقاطعة وسيتم تشغيل مؤشر LED.